{kind=link}
Autonomous vehicles have clocked millions of miles on public roads. Yet, even the most sophisticated software encounters difficulties when reality presents unexpected scenarios. Perhaps a construction sign toppled by wind, a traffic officer gesturing with their hands, or a dog dashing across four lanes of traffic.
Rather than grounding entire fleets until algorithms master every unusual situation, the autonomous vehicle industry is increasingly relying on remote human operators who monitor driverless cars from a distance and, when called into action, take temporary control within seconds. This practice, known as teleoperation, is rapidly becoming a strategic cornerstone for safer, more resilient and more publicly trusted autonomy.
Edge Cases Lay Bare Autonomy’s Limits
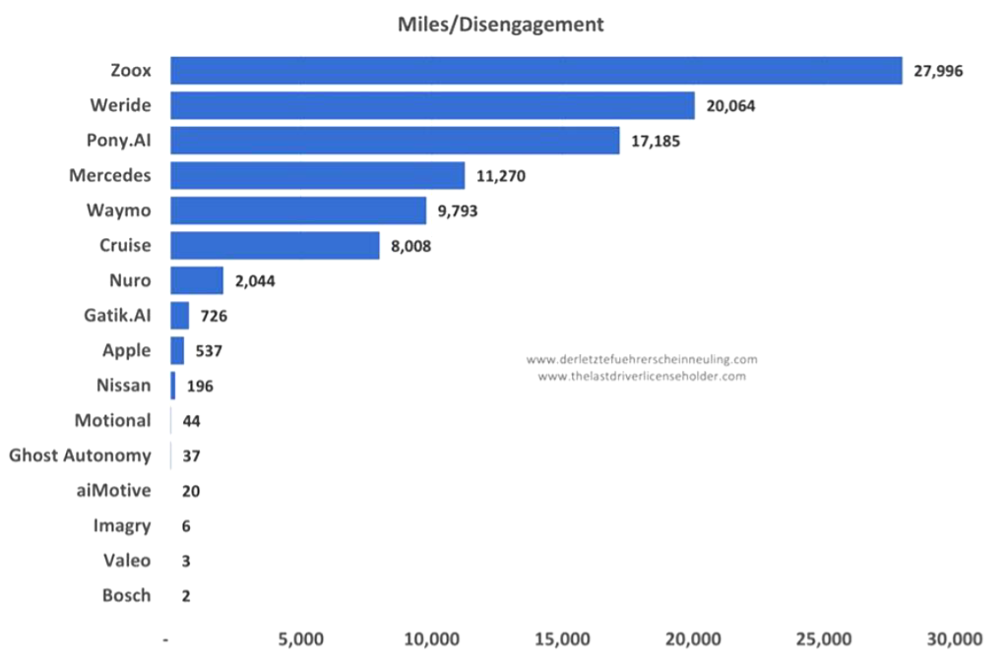
California’s 2024 disengagement data, the most closely watched measurement in the sector, reveals how frequently AVs still require assistance.
Waymo recorded one disengagement every 9,793 miles, whilst newer shuttle operators such as May Mobility needed an intervention approximately every 0.66 miles. These figures make two points unmistakably clear: edge cases remain abundant, and human backups are essential.
Number of miles driven per disengagement in California from December 2023 to November 2024
Teleoperation: A Real-Time Safety Valet
When an AV’s perception system hesitates, a remote operator can intervene—steering around an unmarked pothole or communicating with a traffic marshal—before returning control to the onboard computer.
This human-in-the-loop model significantly reduces the risk of a vehicle freezing or making a poor decision, reducing both collision risk and tariff disruption.
Moreover, a single operator can oversee dozens of vehicles because interventions are infrequent and brief. Such scalability means teleoperation adds minimal cost relative to the safety benefits, preserving the business case for autonomous ride-hailing and various AV service use cases.
Enhanced Safety Through Multi-Modal Communications
Contemporary teleoperation centres don’t simply maintain a video feed—they employ sophisticated communication systems that continuously monitor vehicle health, environmental conditions, and passenger status. These systems provide operators with comprehensive situational awareness through:
- Real-time vehicle telemetry data including speed, acceleration, and component diagnostics
- Multi-angle video feeds with depth perception and enhanced night vision capabilities
- Spatial audio mapping that allows operators to “hear” the vehicle’s surroundings
- AI-powered anomaly detection that pre-emptively flags potential issues before they escalate
The bidirectional nature of these communication systems enables immediate intervention during emergencies—operators can directly communicate with passengers, activate emergency protocols, or coordinate with first responders—all whilst maintaining positive control of the vehicle.
Redundant Communication Pathways: No Single Point of Failure
Leading AV companies now implement triple-redundant communication networks for teleoperation: a primary high-bandwidth 5G connection for normal operations, a secondary LTE/4G fallback network with optimised compression, and a tertiary satellite link for emergency connectivity in cellular dead zones.
This layered approach ensures that vehicles remain connected to operators even under challenging network conditions. When combined with advanced predictive buffering techniques that anticipate network problems, these systems remain operational with less than 0.001% communication downtime.
Confidence Builder for Regulators and Riders
Regulators view teleoperation as a tangible extra layer of safety insurance; several U.S. states now require or explicitly allow remote monitoring in commercial driverless deployments, especially when a safety driver is not present. Passengers, meanwhile, find comfort in knowing a trained human can step in if the robotic driver becomes confused. In consumer focus groups, willingness to ride increases markedly when teleoperation is mentioned as a safety net, a factor that may prove decisive in mainstream adoption.
The US is streets ahead of the UK in terms of AV deployment progress, although the UK is set to roll out self-driving vehicles in 2026.
Regulatory Frameworks Embracing Human Oversight
The regulatory landscape for teleoperation has matured significantly, with 21 states now incorporating specific teleoperation provisions in their AV legislation. The NHTSA’s 2025 AV Safety Framework explicitly endorses teleoperation as a key safety enhancement for Level 4 autonomous deployments, establishing minimum performance standards for:
- Maximum permissible latency (under 150ms)
- Minimum uptime requirements (99.97%)
- Operator-to-vehicle ratios (currently 1:12 maximum)
- Mandatory operator certification and ongoing training
These clear regulatory guidelines have accelerated commercial deployments whilst maintaining strong safety margins. Industry consensus suggests this regulatory certainty has shortened commercialisation timelines by approximately 18-24 months.
Glass-to-Glass Latency: Every Millisecond Counts
For teleoperation to work effectively, the video loop from the vehicle’s cameras to the operator’s screen must be nearly instantaneous.
Industry best practice is sub-100 millisecond “glass-to-glass” latency. Beyond approximately 250 ms, human steering accuracy declines materially and makes remote control useless.
A 2025 5G field trial averaged 202 ms end-to-end delay, a 2024 campus-network demonstration clocked 136 ms, and a controlled laboratory study achieved 88.9 ms. Older LTE experiments hovered well above 200 ms, highlighting why next-generation connectivity and aggressive video-pipeline tuning are mission-critical.
The Advanced Human Interface: Enhancing Operator Performance
Remote operation centres now utilise cutting-edge human factors research to maximise operator effectiveness whilst minimising fatigue and cognitive load.
Key innovations include AR-enhanced interfaces that overlay predictive path information and highlight potential hazards, feedback systems that provide operators with simulated road feel and vehicle dynamics, adaptive workload management that dynamically adjusts operator-to-vehicle ratios based on real-time complexity metrics, and physiological monitoring systems that detect early signs of fatigue or attention lapses.
These human-centred design approaches have reduced operator error rates by 67% whilst extending effective work sessions by up to 3 hours compared to earlier systems.
Passenger Experience: The Human Touch in Robotic Rides
Modern teleoperation systems prioritise passenger communication and comfort. When a vehicle requires remote assistance, passengers receive an immediate notification via in-vehicle screens and audio, whilst the remote operator can directly communicate through the vehicle’s audio system.
AI-driven emotion recognition can alert operators to passenger distress, and custom communication protocols address specific passenger needs, such as those of children, the elderly or disabled individuals.
This human connection transforms what could be an unsettling experience into a reassuring demonstration of the system’s safety architecture. Market research indicates that passengers who experience a smooth teleoperation handover report higher satisfaction scores than those whose journeys never required intervention, suggesting the visible safety net actually enhances the experience.
The Flywheel Effect: Faster Learning, Faster Deployment
Each remote intervention does more than resolve a single challenging moment; it generates a labelled data set that engineers can channel back into training. Over time, the fleet encounters fewer repetitions of the same edge case because the AI has learned from every human-assisted rescue. This virtuous cycle enables companies to scale services sooner, complete with human safety net, whilst systematically driving the disengagement rate ever closer to zero.
Catalyst, Not Crutch
For many in the industry, the long-term goal remains full self-reliant autonomy. Yet, if the industry waits for perfection, mass deployment could be derailed, and even if perfection were miraculously achieved, edge cases can easily transform from electro-mechanical errors to problems dealing with occupant health status or security. Teleoperation offers a pragmatic bridge: AVs can serve riders today under real-world conditions while a human guardian angel silently neutralises most of the rough edges. As WIRED recently quipped, remote driving may be the “sneaky shortcut” that finally enables robotaxis to scale.
In essence, teleoperation is the human safety net that allows autonomous vehicles to run before they can walk—and, paradoxically, may be the fastest path to teaching them to stride confidently on their own.